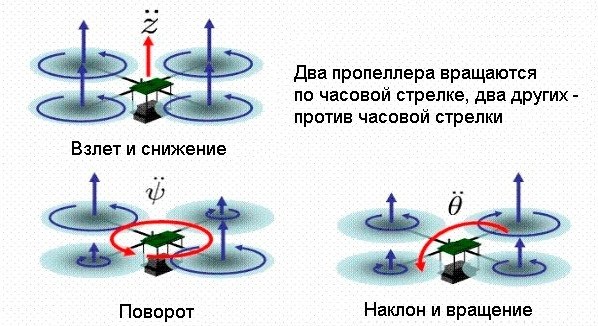
Квадрокоптер — это небольшой беспилотный летательный аппарат, который летает с помощью четырех двигателей. Два из этих двигателей вращаются по часовой стрелке, а два других — против. Они прикреплены к двум одинаковым вертолетам, которые поднимают квадрокоптер в воздух.
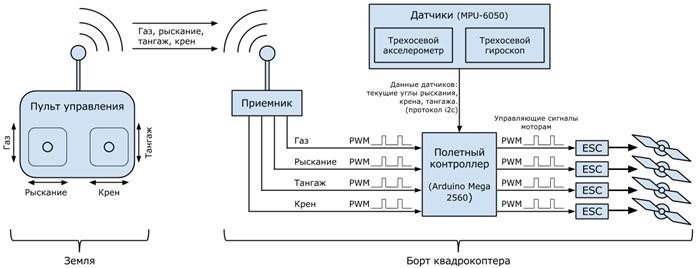
Пилот управляет квадрокоптером (также называемым дроном) с помощью пульта дистанционного управления, который включает в себя передатчик, изменяющий скорость вращения спирали и обеспечивающий гибкость в воздухе. Большинство современных моделей также поддерживают управление с помощью мобильных приложений. Эта функция работает через Wi-Fi, распространяемый смартфоном.

Приемник дрона обрабатывает команды и сигналы пилота. После интерпретации этих данных встроенный полетный контроллер посылает сигналы на ESC (электронный регулятор скорости), который передает команды двигателю.
Из чего состоит квадрокоптер
Двигатель.
Без двигателей квадрокоптеры никуда бы не полетели, ведь они во многом определяют летные возможности аппарата. К сожалению, их технические характеристики не очень понятны для большинства новичков.
В большинстве квадрокоптеров используются бесщеточные двигатели с постоянным приводом, хотя в более дешевых моделях часто встречаются коллекторные двигатели.
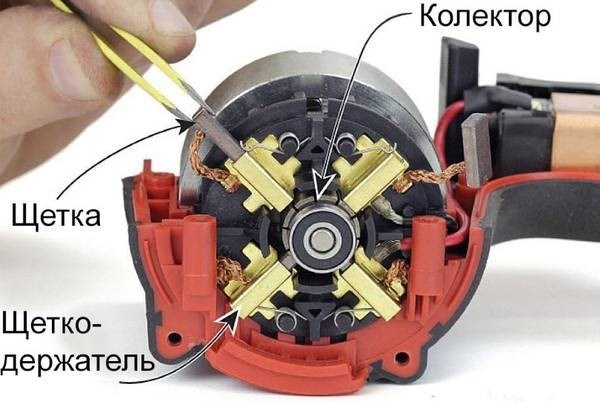
Бесщеточные двигатели состоят из усилителя с постоянным магнитом и ряда катушек вокруг него. Бесщеточные двигатели могут иметь от 2 до 14 полюсов. Чем больше полюсов, тем точнее можно управлять двигателем.
Важной характеристикой четырехполюсного двигателя является величина KV. Значение KV — это номинальное число оборотов в минуту (об/мин), которое двигатель совершает без нагрузки при подаче напряжения 1 вольт. Двигатели с более низким KV развивают больший толчок и оснащаются более тяжелыми медными плавниками большего диаметра. В небольших беспилотных самолетах используются двигатели с высоким KV.
Еще один важный фактор — номинальный ток двигателя. Чтобы выбрать между ESC и батареями, необходимо знать цену.
Номинальная тяга двигателя зависит от размера пропеллера. Основное правило заключается в том, что комбинация двигателя и пропеллера должна создавать тягу, вдвое превышающую вес беспилотного летательного аппарата.
Пропеллеры.
Диаметр и шаг — две основные характеристики четырехлопастного пропеллера.
Пропеллеры бывают разных диаметров и размеров и могут быть изготовлены из пластика, углеродного волокна или дерева. Малые диаметры менее 15 см используются на небольших, быстрых, беспилотных летательных аппаратах. Пропеллеры диаметром более 20 см используются на низкооборотных двигателях беспилотных летательных аппаратов, предназначенных для подъема тяжелых грузов.
Шаг — это расстояние, которое пропеллер проходит за полный оборот. Чем больше шаг, тем меньше сопротивление воздуха и больше скорость подъема. Меньший шаг обеспечивает больший толчок, но быстрее разряжает аккумулятор.
Регуляторы скорости.
Устройства, управляющие двигателями без постоянного питания, называются электронными регуляторами скорости или ESC. По одному устройству устанавливается на каждый двигатель.
ESC должен быть рассчитан на максимальный ток, потребляемый двигателем. Всегда лучше выбирать ESC, чей номинальный ток больше максимального тока двигателя.
Контроллер.
Полетный контроллер — это мозг Tetrac. Это устройство управляет скоростью вращения двигателя, посылая сигналы на ESC.

Продвинутые полетные контроллеры имеют больше функций и подключены к таким датчикам, как гироскоп, акселерометр, сонар, GPS и магнитометр. Простые полетные контроллеры содержат только гироскоп, которого достаточно для большинства новичков.
Рама.
Четырехслойные рамы изготавливаются из различных материалов: дерева, пластика и углеродного волокна. Карбоновые рамы очень хрупкие, и неопытные владельцы часто ломают свои дроны при посадке или столкновении с препятствиями.
Древесина 4-corp чувствительна к деформации под воздействием влаги и погодных условий. Если геометрия рамы нарушается, управление дроном значительно ухудшается.
Размер четырехугольной рамы определяется в миллиметрах. Это расстояние между двигателями внутри нее. Основные размеры — 180, 210, 250, 280 и 400 мм. Самый распространенный и универсальный из них — 210 мм.
Основные режимы полета
Ручное управление.
В основном используется, когда требуется максимальный контроль над маневрированием. Эту функцию предпочитают опытные пилоты. Некоторые базовые авиационные контроллеры работают только в этом режиме.
Буст.
Большинство современных контроллеров беспилотных летательных аппаратов оснащены датчиками барометрического давления, которые могут определять едва заметные изменения атмосферного давления. Выбор этой функции помогает дрону поддерживать заданную высоту.

Поддерживать позицию GPS
Эта функция автоматически поддерживает нужное боковое и вертикальное положение квадрокоптера, что делает ее идеальной для обучения полетам.
Безопасность.
Активирует функцию, позволяющую дрону терять связь с беспроводной сетью, если он улетает за пределы безопасного расстояния. Если вы перейдете к этой функции, контроллер дрона вернется и вернет дрон туда, где он остановился.
Что такое квадрокоптер — его назначение и устройство
Создание компактных летающих аппаратов началось в военном секторе. Сегодня беспилотники используются многими военными по всему миру, выполняя функции распознавания и курьерской доставки. Разработка очень маленьких беспилотных летательных аппаратов началась в политическом секторе. Сегодня мы поговорим о том, что такое квадрокоптеры и каково их назначение.
Квадрокоптеры — это компактные аппараты с четырьмя пропеллерами, которые двигаются от общего или отдельного двигателя. Аппарат может взлетать перпендикулярно поверхности земли и выполнять ряд воздушных трюков. Такие аппараты используются в индустрии развлечений и во многих профессиональных профессиях.

Конструкция, особенности строения дрона
Для начала необходимо узнать о квадрокоптерах и понять их основные преимущества, а также недостатки. Устройства помещаются в каркас, и каждый производитель изготавливает их из разных материалов. Как правило, в производстве используются легкие прочные материалы, такие как алюминий. Сердцем беспилотного устройства является двигатель, который питается электричеством от встроенного аккумулятора. Четыре пропеллера вращаются и могут управлять устройством. Дизайн изделия зависит от его назначения, размера и других особенностей.
Важнейшей деталью при таком подходе является фирменная электронная система управления. От качества и модернизации системы зависит ее качество. С помощью сконструированного «мозга» техника может самостоятельно поддерживать заданные координаты, компенсировать влияние ветра, связываться с пультом управления по разным каналам сигнала и совершать различные повороты. Управление коптером может осуществляться с помощью пульта для смартфонов или специальной программы.
Как работает современный квадрокоптер?
Все пропеллеры работают как маленький вертолет. Движение вверх/вниз контролируется скоростью вертолета. Для полета влево/вправо и вперед/назад используются уклоны под определенными углами. Технология проста, но для ее реализации требуются сложные программные блоки и системы.
Действия дрона основаны на простом алгоритме.
Современное поколение техники демонстрирует удивительные возможности и включает в себя множество запланированных режимов полета. Принципы работы и новые функции квадрокоптеров дополняют друг друга.

Как выбрать и купить летательный аппарат?
Теперь вы знаете, что такое квадрокоптер и как он работает. Осталось выбрать подходящую для ваших целей модель и получить массу положительных эмоций от управления техникой. Чтобы купить квадрокоптер, выберите модель в каталоге интернет-магазина idrone.
В ассортименте представлены наиболее подходящие варианты коптеров DJI, Parrot и SWELLPRO. Есть модели для любительского использования, игрушки и профессиональное оборудование. Аксессуары и добавки представлены на странице магазина. По вопросам приобретения или за консультацией обращайтесь к менеджеру компании.
О квадрокоптерах для начинающих. Как они устроены и как летают
Квадрокоптеры прочно вошли в нашу жизнь. Это небольшие устройства, и их основное назначение — освоение первых навыков управления летательным аппаратом. Это более сложные модели, которые подходят как для простого развлечения с высоты птичьего полета, так и для любительской видеосъемки. Это спортивные модели, предназначенные для выполнения воздушной акробатики. Это и кинематографические, оснащенные «хреновыми» камерами, способными снимать фото и видео профессионального качества.

Но какой бы ни была категория квадрокоптеров и их размер, устройство и принципы полета одинаковы.
Квадрокоптер — это силовая рама (платформа или каркас) из легких, но прочных материалов с четырьмя двигателями, установленными на боковых «ногах». Независимо от размеров и «наворотов», общая конструкция и принципы работы для всех одинаковы.
Декоративный корпус дрона может быть самых разных форм и цветов — это главная деталь четырехколесного аппарата, над которой работают дизайнеры, стараясь придать уникальность разрабатываемой модели дрона и «зацепить» ее потенциальных покупателей стилем, красотой и узнаваемостью.
Квадрокоптер летает благодаря четырем пропеллерам (пропеллерам, плавникам) в углах виртуального квадрата, создающим подъемную силу. Начало полета очень похоже на форму вертолета. Только при применении принципа оси закрылков для достижения боковых векторов вертолета этот дрон достигается за счет изменения сил боковых воздушных потоков при работе двигателей. Если все четыре двигателя работают с одинаковой скоростью, квадрокоптер поднимается вверх. При работе всех четырех двигателей на одинаковой скорости он снижается, но с меньшей скоростью, чем поднимается. В результате подъемная сила уменьшается, и квадрокоптер плавно опускается. Дрон наклоняется, когда обороты левого и правого двигателей отличаются. Дрон наклоняется влево, когда обороты левого мотора уменьшаются. Если правый оборот двигателя меньше левой пары оборотов, квадрокоптер наклоняется вправо. Управление скоростью при движении по прямой осуществляется путем изменения скорости вращения переднего и заднего моторов. Для поворота квадрокоптера вокруг своей оси достаточно уменьшить обороты одного из четырех двигателей.

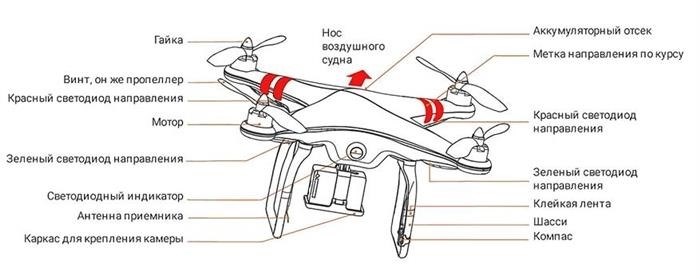
Общая структурная геометрия квадрокоптера проста. Электродвигатели расположены на выносных ножках, прикрепленных к силовой раме. Внутри пристроен декоративный корпус, в котором смонтированы аккумулятор, электронная плата, блоки для подачи сигналов дистанционного управления, преобразователи напряжения и блоки датчиков (гироскоп, акселерометр и т.д.). Квадрокоптеры могут быть оснащены встроенной — или выносной — камерой.
Для проверки квадрокоптера можно использовать пульт дистанционного управления (связь с дроном по радиоканалу) со специальной программой или приложением, установленным на устройство или смартфон (связь с дроном осуществляется по WiFi, что ограничивает дальность управления дроном. (до 100 метров в условиях визуального контакта).
Сегодня можно приобрести дроны любого размера, назначения и стоимости. От грошовых, предназначенных для полетов по квартирам, до дорогих моделей с большой грузоподъемностью. Главное, что нужно помнить при выборе, — правильно определить круг задач, которые должен выполнять ваш квадрокоптер. Удачных полетов!
Квадрокоптеры — как все начиналось?
Современный коптер Quadro (Hexa, Octo) — это достаточно мощное «вычислительное» устройство, управляемое по WiFi смартфоном, подвешенное в определенной точке и летающее по маршруту. Купить такое устройство сейчас может любой желающий. А с чего все это началось?
Как летает квадрокоптер?
Чтобы понять суть технического решения, давайте немного разберемся в том, как обычно летают квадрокоптеры. По сути, квадрокоптер — это неустойчивая система. Используя четыре двигателя, просто подключенных к аккумулятору, квадрокоптер никуда не полетит. Он просто перевернется, потому что двигатели не одинаковые. И здесь на помощь приходит электроника. Квадрокоптер имеет центральную «плату управления», основной частью которой является блок датчиков. В самом простом случае это трехосевой гироскоп. Микроконтроллер постоянно считывает данные с гироскопов. Как только гироскоп «чувствует» уклон оси, контроллер дает соответствующую команду двигателю увеличить или немного уменьшить скорость, чтобы компенсировать уклон. Это почти вся логика — кроме множества вещей (ПИД-регулятор, теория управления, фильтр Калмана), здесь нет ничего сложного (я шучу). Ну а для пользователя все действительно прозрачно. Здесь нет никаких движущихся частей, кроме двигателя квадрокоптера. Все управление осуществляется исключительно за счет изменения оборотов двигателя (повороты тоже, меняем обороты и получаем крутящий момент). А теперь вернемся к истории.
Легендарная немецкая компания, благодаря инженерам которой первое устройство появилось в 2006 году. Контроллер имел встроенный процессор Atmega644 с памятью 4 кбайт, частотой до 20 мГц, 3 гироскопа по каждой оси и высоте (для горизонтального полета). (точность MPX4115A около 1 м). Затем были добавлены дополнительные устройства, включая GPS для поддержания позиции.
Видео можно найти на YouTube. А что со всем этим было в 2007 году?
В целом, системы оказались очень удачными. Их продукция не дешевая, цены начинались от 1500 евро. Компания существует и по сей день и выпускает профессиональные устройства. Ценовые категории сопоставимы. И еще один важный момент — поначалу создатели микрокоптера сделали исходный код открытым. Разумеется, за короткое время стали появляться различные клоны (в том числе и российского производства). Это, конечно, негативно сказалось на продажах, и впоследствии код был закрыт. Но, опять же, я считаю, что это сильно подтолкнуло к созданию различных типов поликапперов. В нашей стране микрокоптеры не были популярны из-за цены, да и владельцев было не так много. Однако был дан толчок мировому сообществу, и начали появляться различные системы.

Одна из самых простых систем выпускается (в разных версиях) с 2010 года по сегодняшний день. На плате управления всего три гироскопа, а для регулировки параметров используются простые переменные резисторы. (Фото с сайта hobbyking. com).
Как видите, на такой плате нет ничего, кроме гироскопов и слабого процессора на борту. Исходный код прошивки для KK находится в свободном доступе в сети, для тех, кто может скачать его, набрав в поиске Google название файла ‘KK2_1V1. ZIP’ (размер всего 90 кб). Предположительно, это первая и последняя версия прошивки коптера, написанная на языке ассемблера.
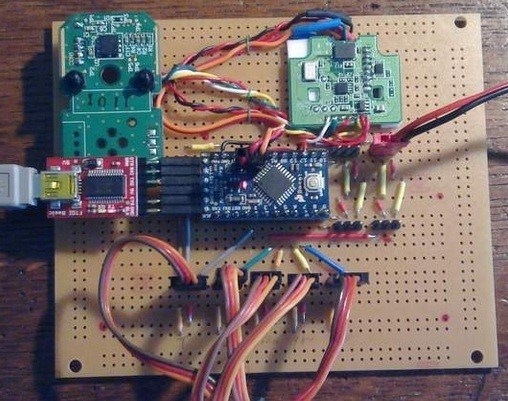
Следующей вехой в развитии коптера стала система multi-WII. Название происходит от Nintendo Wii и Wii Nunchuk, которые были разобраны и идентифицированы с платой датчиков. В качестве центрального процессора использовалась Arduino Nano. Плата выглядела так (Сайт RCGroups, фото 2010 года):

Однако с годами система эволюционировала, и последняя плата (все еще продающаяся, но по цене $20-30) выглядела так (фото с сайта Hobbyking. com)
Последняя версия MultiWII оснащена очень хорошими датчиками и может зависать в точках GPS, поддерживать высоту и возвращаться домой. MultiWII написан для Arduino, поэтому все платы совместимы с Arduino, а исходный код можно скачать на GitHub. Одним из недостатков Multi WII является слабый процессор, который ограничивает вычислительную мощность алгоритма, и позже стали появляться клоны на STM32, но с точки зрения «материалов» все квадрокоптеры очень просты, поэтому погоды не делают. Сложность заключается в коде. В то же время мы убеждены, что исходники Multiwii стали основой для всех коммерческих систем сегодня.

Другая система, основанная на Arduino, более совершенна, чем остальные. В системе реализованы программируемые полеты, в том числе «точка-точка», поддержка передачи радиомодемов и телеметрии, хранение различных логов. Их программное обеспечение выглядит так:
Из этого развились плакетки:
Среди них.

Платы уже доступны для продажи, их цена варьируется от $50 (клон) до $250 за оригинальную версию. Исходный код Ardupilot также полностью доступен на Github, и, судя по количеству коммитов, проект активно развивается. По своим возможностям система не относится к профессиональным устройствам. О качестве полетов можно судить по видео.
Все здесь хорошо, кроме одного «но» — это открытый исходный код, и все результаты последуют. Система с открытым исходным кодом, разработанная энтузиастами, и никто не гарантирует, что программное обеспечение не содержит ошибок и т.д. Если квадрокоптер падает в чей-то BMW, никто не жалуется.
Бесколлекторные подвесы (brushless gimbal)
Помимо квадрокоптера, разрабатывается еще одна очень интересная технология. Это двигатель без фото/ видеокамеры. Это отдельная плата с собственными датчиками, которая благодаря двум двигателям удерживает камеру в нужном положении и смещает поворот каждой оси. Их разработал наш соотечественник, компания Contribution Mechanism. Вы можете увидеть его на видео (2013).
Видно, что средство вращается, а ось камеры — нет.
Сейчас этим никого не удивишь, но тогда это была настоящая революция в качестве видео.
Квадрокоптер. История, принцип работы

Квадрокоптер — это летающее устройство, выполненное в форме вертолета, но у него четыре ротора.
Принцип работы квадрокоптера
Квадрокоптер оснащен четырьмя устойчивыми пропеллерами. Такой поликорп отличается от монокля размерами и отсутствием автомата перелива. Каждый пропеллер имеет свой собственный двигатель, который приводит устройство в движение.
Квадрокоптер оснащен четырьмя двигателями, каждый из которых имеет собственное зарядное устройство (аккумулятор). Два пропеллера вращаются против часовой стрелки, а два — в противоположном направлении. Благодаря этой особенности основного вертолета, поликоптеру не нужен пропеллер.
Маневрирование тетракоптера осуществляется за счет регулировки скорости вертолета и происходит таким образом.
Тетрадрайдер.
Квадрокоптер имеет четыре пропеллера, каждый со своим двигателем. Все пропеллеры работают как единое целое. Для управления работой устройства используется микропроцессорная система. Радиокоманды поступают на устройство, а система преобразует их в команды для отдельных двигателей. Для надежной остановки четырехугольника в воздухе установлены три гироскопа. Это позволяет определять уклон поликоптера.
В некоторых случаях аппарат может быть оснащен акселерометром (для фиксации аппарата в горизонтальном положении) и датчиком вертикали (для настройки аппарата на нужную высоту). Сонар может использоваться в автоматическом режиме для снижения и приземления. Он помогает избегать препятствий. GPS-приемники установлены на четырех поликопах. Это позволяет компьютеру заранее записывать маршрут, по которому летит аппарат. В случае потери связи с администратором GPS-приемники помогают вернуть квадрокоптер в исходную точку.
В зависимости от расположения двигателя устройство делится на два типа
За и Против
Преимущества четырехпропеллерных поликоптеров:
Единственный недостаток — цена. В продаже есть экономичные модели, но качество материалов в них не всегда лучшее. Кроме того, в них установлено только самое необходимое. Если вам нужен квадрокоптер для профессионального использования, придется раскошелиться на значительную сумму.
detector